I am a Ph.D. student in the Robotics Institute at the School of Computer Science, Carnegie Mellon University, advised by Prof. Srinivasa Narasimhan. My research lies at the intersection of computer vision, imaging, and robotics, with a focus on moving beyond the visible spectrum to unlock new sensing and inference capabilities. In particular, I develop physically grounded algorithms that leverage heat transport and light transport to infer shape, material properties, and scene semantics from visual data.
Beyond imaging, I am broadly interested in AI for embodied systems and robotics, with recent work exploring physics-aware world models and controllable video generation as a foundation for multimodal perception and interaction. My research spans not only the development of novel algorithms, but also their deployment on real-world robotic platforms, including autonomous systems operating in complex environments. I care deeply about closing the loop between theory, perception, and real-world execution.
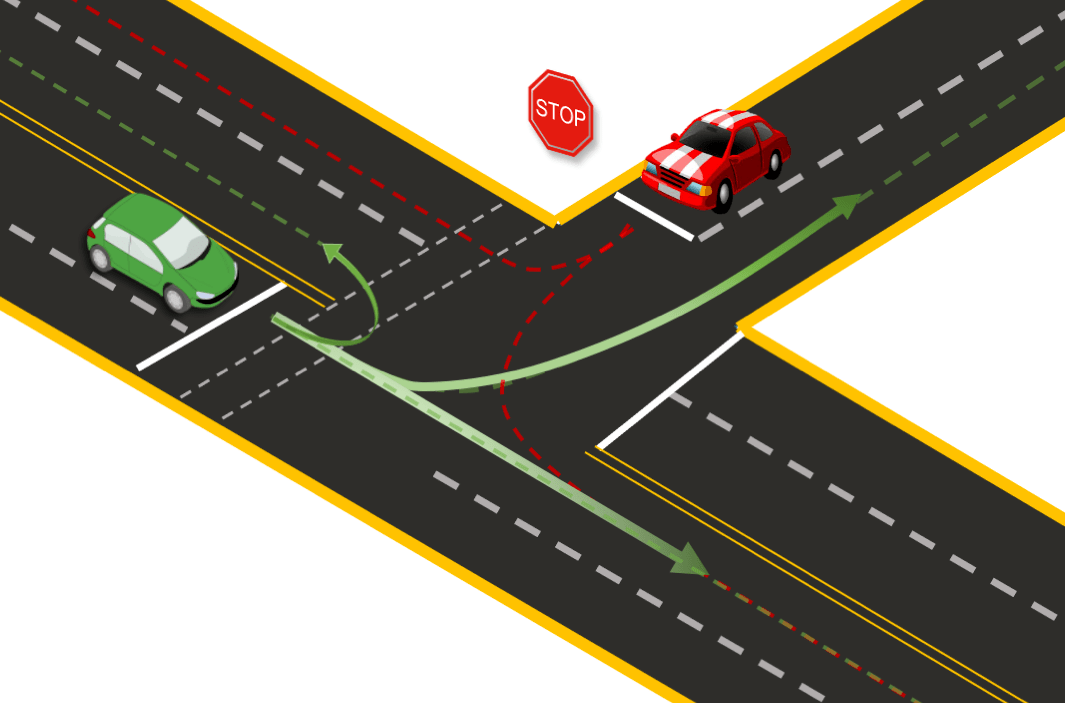
Prior to my Ph.D., I was a Research Scholar at NEC Laboratories America in the Media Analytics group, where I worked with Prof. Manmohan Chandraker on trajectory prediction and embodied AI, with applications to autonomous driving and robotic perception.
Feel free to connect with me at snochurn [at] cs.cmu.edu.
News
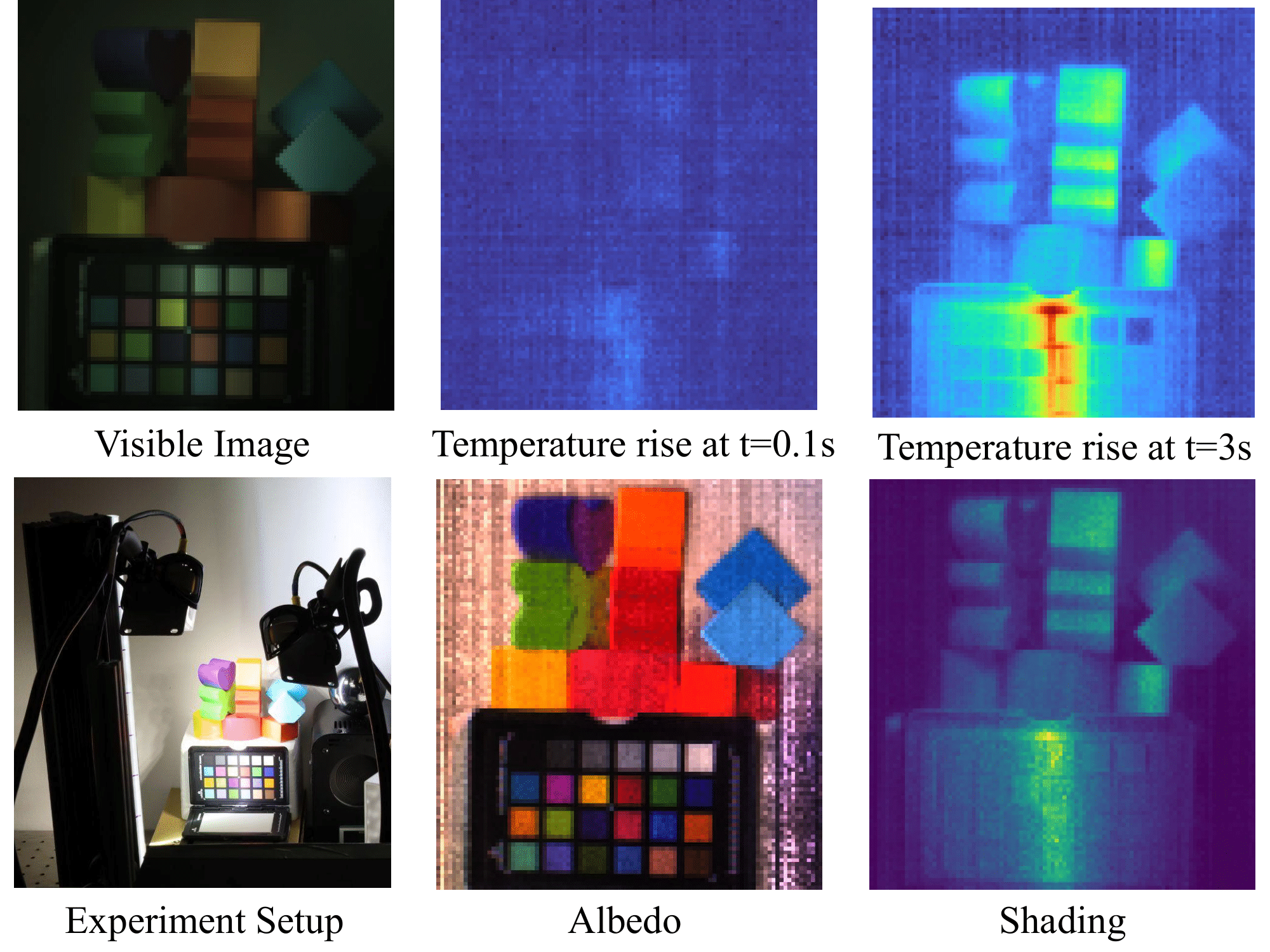
- 06/25 Paper on resolving ambiguities in shape-from-heat conduction accepted to ICCP 2025.
- 07/24 Paper Shape from Heat Conduction accepted to ECCV 2024 (Oral).
- 02/24 Paper on visible-thermal light transport accepted to CVPR 2024.
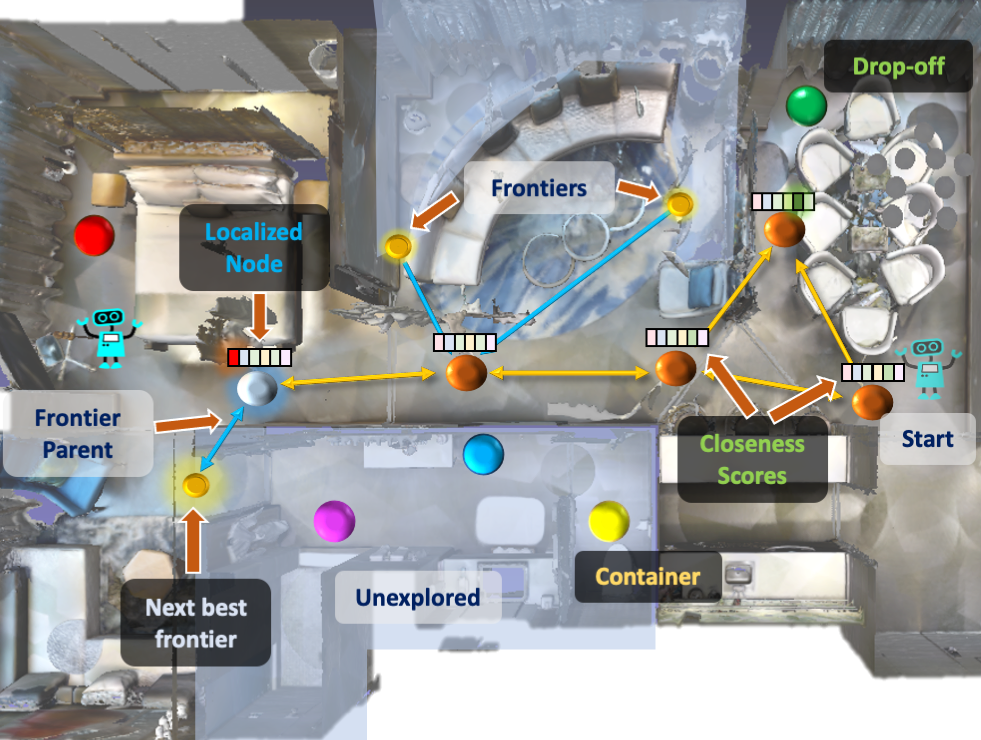
- 01/24 Paper on long-horizon object transport accepted to ICRA 2024.
- 08/22 Moved to Pittsburgh and started my PhD at RI, CMU.
- 10/21 Talk on Predicting simultaneous multi-hypotheses futures at Robotics Research Group, IIT BHU.
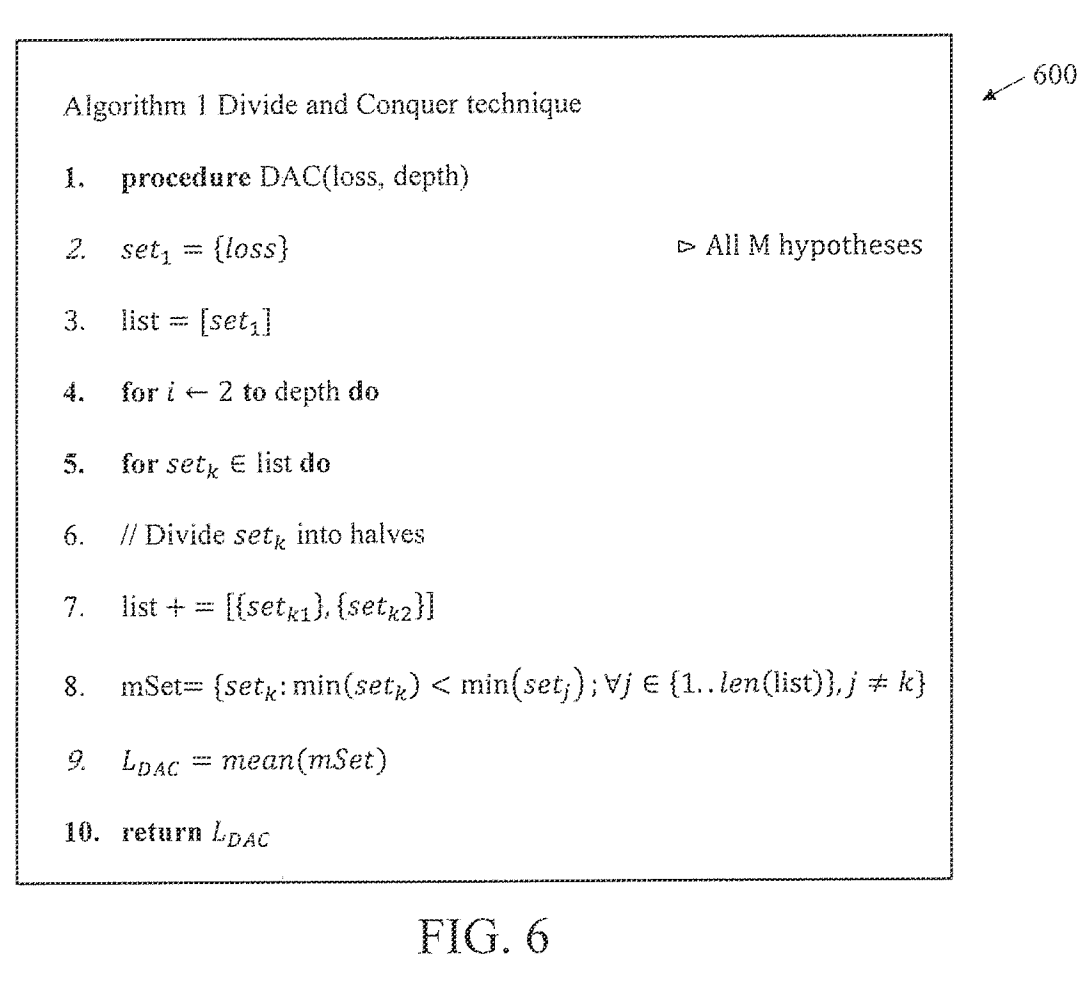
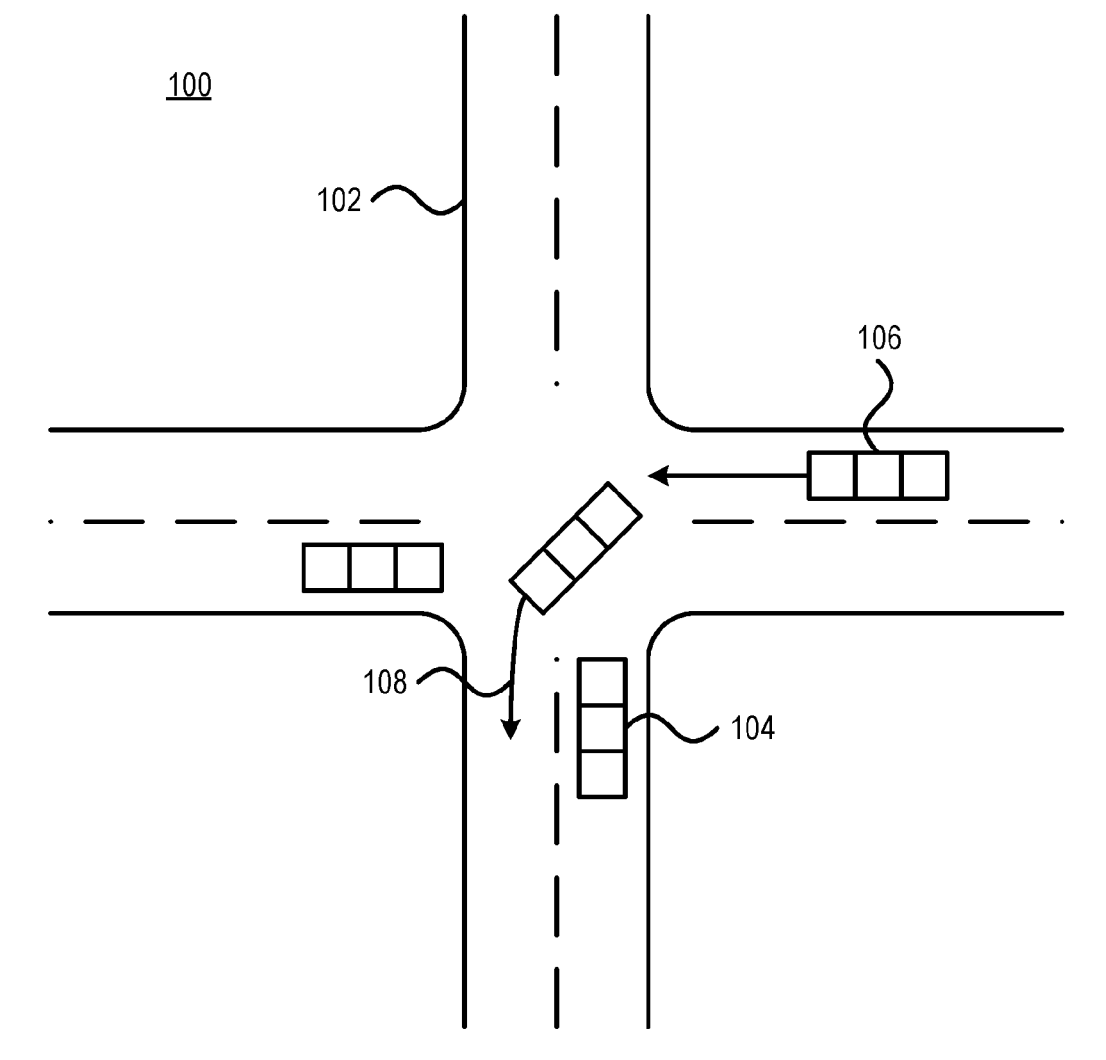
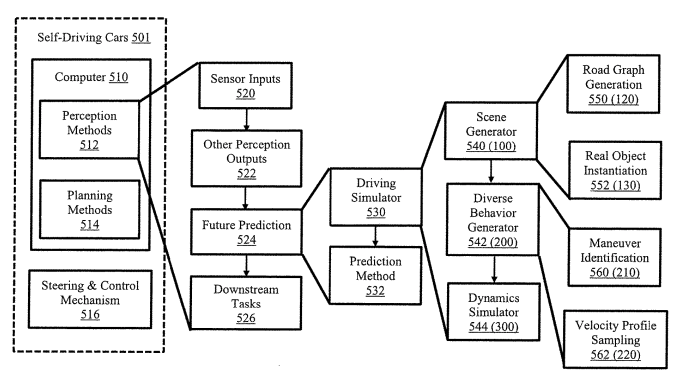
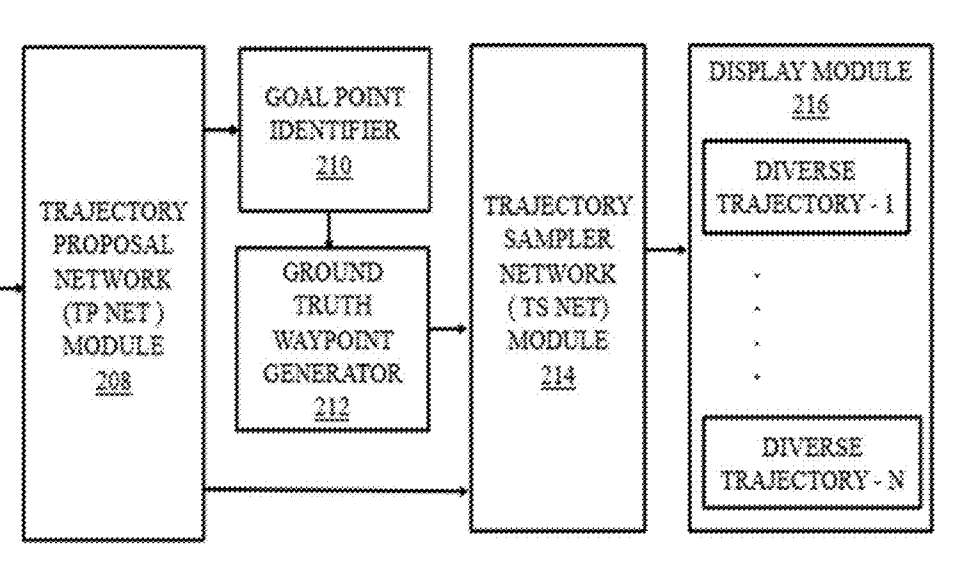
- 02/21 Paper Divide and Conquer for Lane-Aware Diverse Trajectory Prediction accepted to CVPR 2021 (Oral).
- 07/20 Paper SMART: Simultaneous Multi-Agent Recurrent Trajectory Prediction accepted to ECCV 2020.
- 07/19 Joined NEC Labs America as a Research Scholar.
- 06/19 Paper Talk to the Vehicle: Language Conditioned Autonomous Navigation accepted at IROS 2019.
- 04/19 Paper A Hierarchical Network for Diverse Trajectory Proposals accepted at IV 2019.
Publications



Selected Projects

Building Perception, Planning and Control for Autonomous Vehicles
Bachelor thesis at IIIT Hyderabad. Designed low-level controller from scratch for a stock car, integrated perception (ORB-SLAM, LOAM) and planning (RRT*) modules, and demonstrated static obstacle avoidance in tight spaces.
Bothoven - Eyantra Robotics Competition
A multi-robot task execution problem where two robots simultaneously plan paths, coordinate, and play an audio file concurrently. Uses FFT to decode notes and dynamic replanning on obstacle encounters.

Swarath - Self Driving Car
Internship project at IIIT Delhi during Summer 2017, where I worked on building an SDV prototype. Designed controller and planner for the vehicle, built perception systems using sensor outputs for occupancy, and demonstrated autonomous navigation with GPS waypoints.
Professional Services
Conference Reviewer:
- CVPR: IEEE/CVF Conference on Computer Vision and Pattern Recognition (2021-Present)
- ICCV: IEEE/CVF International Conference on Computer Vision (2021-Present)
- ECCV: European Conference on Computer Vision (2022-Present)
- TCI: IEEE Transactions on Computational Imaging (2025)
- ICRA: IEEE International Conference on Robotics and Automation (2020, 2022)
- IROS: IEEE/RSJ International Conference on Intelligent Robots and Systems (2021)
- AAAI: Association for the Advancement of Artificial Intelligence Conference (2022, 2025)