Projects

Building Perception, Planning and Control for Autonomous Vehicles
Bachelor thesis at IIIT Hyderabad. Designed low-level controller from scratch for a stock car, integrated perception (ORB-SLAM, LOAM) and planning (RRT*) modules, and demonstrated static obstacle avoidance in tight spaces.

Husky - Visual Perception based Autonomous Bot
Implemented obstacle avoidance and waypoint following using stereo camera, GPS, IMU and wheel encoders. Generated occupancy maps for RRT-based autonomous planning.
Bothoven - Eyantra Robotics Competition
A multi-robot task execution problem where two robots simultaneously plan paths, coordinate, and play an audio file concurrently. Uses FFT to decode notes and dynamic replanning on obstacle encounters.
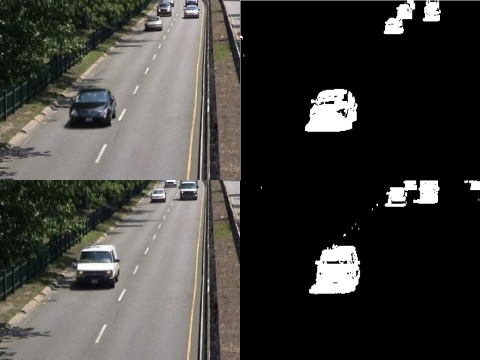
Background Subtraction
Project with Dr. Manigandan on designing a background subtraction algorithm based on mixture models for surveillance applications.

Swarath - Self Driving Car
Internship project at IIIT Delhi during Summer 2017, where I worked on building an SDV prototype. Designed controller and planner for the vehicle, built perception systems using sensor outputs for occupancy, and demonstrated autonomous navigation with GPS waypoints.
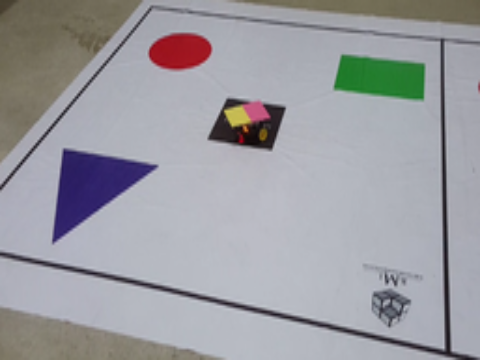
Vision based Robot Localization
Winner at computer vision based robotics competition for consecutive years 2016-2017. Robot localizes using camera-based pose estimation with a PID control system.

AutoNimbus - Connecting Vehicle to the Cloud
National Finalist at General Electric Edison Challenge 2016. A complete car monitoring platform using OBD diagnostics, with cloud-based ML for predicting breakdowns and gear-shift assistance.
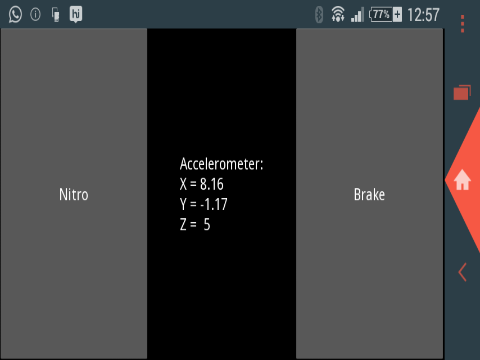
Game Controller App using Kivy Python
A cross-platform mobile game controller with accelerometer support and customizable keybindings for controlling agents in games.
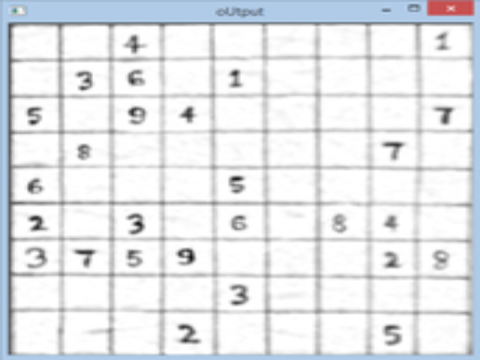
Sudoku Solver for a Real Time Image
A computer vision application that provides a solution when an image of a Sudoku is shown as input. Uses affine transformation, OCR-based digit detection, and brute force solving.